SUSTAINABLE FOREST MANAGEMENT AND PLANNING USING DEPTH-TO-WATER MAPS, MAPPING APP: PART 3
In the final of the three-part blog series, the free download TECH4EFFECT (T4E) mapping app is discussed. The app that was developed by T4E partners, the Austrian forest logistics company Latschbacher in association with the University of Goettingen, provides a “surprise-free-forest-operation” quantified by Depth-to-Water (DTW) trafficability maps. In a diverse forest sector, there is a need to develop mapping solutions for sustainable forest management that work across platforms.
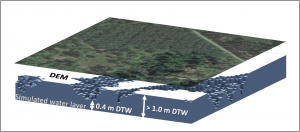
The Depth-To-Water index (DTW) indicates the vertical proximity to the nearest simulated water layer, as given by flow lines or areas which are saturated by water. Particularly, this metric index is calculated for each cell of a digital elevation model (DEM). Values below 1 metre would represent wet areas with high susceptibility for soil deformations, whereas values above 1m should possess sufficient trafficability for heavy forest machines. Courtesy: Marian Schönauer.
Knowledge and technologies for wood procurement
The essence of the TECH4EFFECT project is to develop knowledge and technologies for effective wood procurement. European reliance on timber resources for diverse bio economy value chains necessitates an increase in wood mobilisation.
Harvesting wood with minimal environmental impact means carrying out a responsible and detailed planning of the harvesting operation. This was detailed in Blog 1 of sustainable forest management and planning using digital terrain models which can be read HERE.

Harvesting on frozen ground minimizes ruts. Climate change has jeopardised this condition with average global temperatures rising.
Changing weather patterns have jeopardized the sustainability of forest operations where temperatures do not drop below zero as frequently as they used to. Harvesting on frozen ground is preferable because soils are more protected by the hard ground. While heavy forest machines have led to substantial gains in production efficiency, they also come with the inherent potential to compromise soils and can impact on the long-term sustainability of forests.
Accordingly, it is necessary that knowledge, technologies and tools are further developed and implemented across the forest sector to avoid unnecessary ruts. Environmental performance must become an integral part of the normal performance evaluation for forest machines and operations to avoid deep ruts, shown below.

A practical harvesting operation
In a practical harvesting operation, it can be a challenge to predict where wet areas are located. This is often due to bad visibility in dense forest stands. Wet areas are usually associated with low trafficability, which would be a red flag for machine access due to the detrimental effect on soils.
The T4E trafficability maps were covered at length in Blog 2 of this series, which can be read HERE. The DTW algorithm was selected by T4E for use as the main method for modelling terrain trafficability to identify wet soils. T4E researchers used the DTW algorithm to further validate predicted soil bearing capacity through all seasons.
Preliminary results show a high overlap of low soil bearing capacity with areas already predicted to be sensitive, according to the DTW index. These findings have encouraged T4E researchers to further elaborate the algorithm and implement it in every-day-use of forest operations.
Maps across platforms
One of the biggest challenges in implementing trafficability modelling systems lies in encouraging operators to upload and utilize trafficability maps in the first place. Some machine manufacturers have more advanced IT systems than others, so the idea is to be able to provide mapping functionalities that can be used by all forest actors.
The T4E mapping app was developed as a solution to accurately guide drivers combining information derived from a GPS application and the T4E DTW maps. The mapping app is available for Android OS mobile devices.
T4E Mapping App


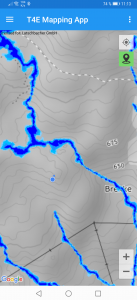
The T4E mapping app uses an in-built GPS to screen the operators’ position on cartographic maps, containing the DTW maps, which predict areas with low trafficability. This mapping can be combined with different layers, as orthophotos (left), and other specific maps like topographic maps (middle) or open street maps (right).
Specifically, T4E partners, Austrian forest logistics company, Latschbacher, and the University of Goettingen, Germany, developed the T4E mapping app to provide a “surprise-free-forest-operation” solution which informs machine operators of wet and sensitive areas within forest stands, as predicted by a DTW map. The app can be downloaded free on google HERE.
The mapping app can be uploaded and depicted on the onboard computers of forest machines and be used in every-day operations across platforms. With the use of the in-built GPS, the position of the forest machine or worker using the device is always indicated in relation to other features on the map.
The app, which has been developed, tested and carried out in an operational setting, was conceived as a visualization tool for foresters and machine operators to plan and adapt their navigation within forest stands in accordance with predicted areas of low trafficability, as indicated by the DTW maps.
In particular, the DTW approach is composed of different “scenarios”, each representing an overall moisture condition. Subsequently, if there has been a week of rain, the driver would select the DTW scenario, which represents the actual moisture condition of the soil, and the app would highlight where and where not to drive.
Since a harvesting operation requires a strong focus of the machine operator on the manipulated timber, it would be tiring to constantly check the DTW maps, depicted on on-board monitors. Thus, the T4E mapping app contains an automated push notification, which warns the machine driver when approaching a critical area, without constantly looking at the map depicted on a monitor.
Other data can be accessed such as woodland key habitats and other hotspots requiring special awareness, as well as terrain or slope maps. The maps have a caching functionality, allowing for use offline, which is important when working in isolated forest environments with unreliable or weak connectivity.
As Web Map Service is used, any data layers or created maps from any participating country can be displayed. To read the full text, and the detailed explanation on how to use the app, download the PDF HERE!
Continuous improvement for environmental best practice
In forestry, accessibility maps continually are being refined by adding more local information and predictions. A wider uptake of these maps and apps across forestry is the aim of European funded projects, such as TECH4EFFECT, in that knowledge and technologies developed across the consortium can be further exploited in the field (BBI JU, H2020, grant agreement number 720757).
A view into the future of wet area mapping may even be a live app where you would see continuous responses of weather in real time. While science may not be quite there yet, offering the harvesting operator an app, with several scenarios, is a big step towards achieving sustainable forest management practices for timber harvesting.
______________________________________________________________________________________________________________

Marian Schönauer is a research associate at the University of Göttingen. Within the TECH4EFFECT project he liaised with detailed expertise across the Consortium concerning Depth-To-Water and machine-soil interaction. He was instrumental in writing and formulating the Deliverables with senior experts within Work Package 4, aimed at the development of tools to minimise wheel rutting during harvesting operations. He is also involved in University of Göttingen’s “BefahrGut” project which is designed to adapt the Depth-To-Water algorithm to European conditions.

Dr Joachim Bernd Heppelmann is a postdoc researcher in the Division of Forest and Forest Resources of the Norwegian Institute of Bioeconomy Research (NIBIO). His speciality is in fully mechanised harvesting operations, focusing on large machine operations and remote sensing. His research encompasses evaluating harvesting operations and machine applications, with a focus on productivity and environmental impact. He was significantly involved within the adaption of Debarking Harvesting Heads for central European conditions. Within his current research for the BBI JU/Horizon 2020 – Tech4Effect project – he assess driving patterns and rut damage, using drones and remote sensing approaches to link the severity of the damages with pre calculated Depth-to-Water information. Furthermore, he took the lead on investigating the tethered harvesting operation utilising a T-Winch supported harvesting approach in steep terrain of western Norway.

Philippa Webb-Muegge is responsible for project communication and dissemination for the TECH4EFFECT project at RTDS Group. With a news, speechwriting and editorial background, her strength lies in communicating research results to a wider audience. RTDS is Austria’s leading consultancy to develop, implement and manage EU funded research and innovation projects.

